 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskyDesign of a generic hybrid mechanism for hydraulic actuation in humanoid shoulder joints
- Volume
- CitationSoukarieh W, Sleiman M, Tayba A, Su H, Alfayad S. Design of a generic hybrid mechanism for hydraulic actuation in humanoid shoulder joints. Mechatronics Tech. 2025(1):0005, https://doi.org/10.55092/mt20250005.
- DOI10.55092/mt20250005
- CopyrightCopyright2025 by the authors. Published by ELSP.
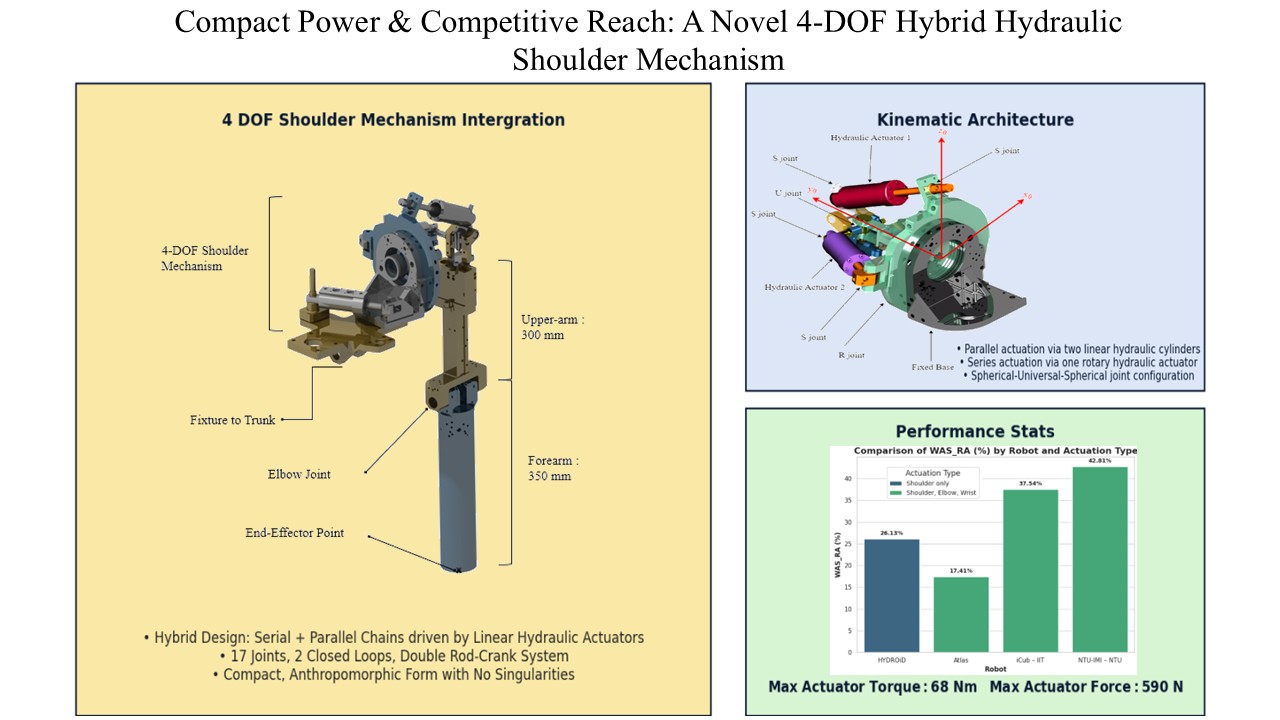
This paper introduces a hybrid serial-parallel mechanism developed for the arms of the HYDROïD humanoid robot, aiming to enhance workspace while improving structural stiffness and rigidity. The mechanism is composed of two integrated substructures: a serial chain and a fully parallel subsystem. Although hybrid architectures have been underexplored in humanoid robotics, their combination of serial and parallel advantages presents a promising solution to challenges such as compactness and the varied range of motion required in pitch, yaw, and roll directions. A key design objective is to maintain a slim and anthropomorphic form to facilitate effective and intuitive human-robot interaction. To meet this criterion, the modified Hanavan model was used to determine the geometric and inertial properties of the robot’s upper body, particularly the shoulder mechanism. For initial spatial approximation, the shoulder joint and upper torso were modeled using simplified geometries such as cylindrical cones or bounding parallelepipeds to respect the compact design envelope. These spatial constraints support the use of hybrid architectures over purely parallel configurations. Finally, the kinematic performance of the proposed mechanism is validated through numerical simulations of the workspace and joint torques, demonstrating the feasibility and effectiveness of the hybrid design approach in humanoid robotics.
humanoid robot; shoulder mechanism; hybrid mechanism; kinematic analysis; workspace analysis; hydraulic actuation; hybrid serial-parallel; kinematic structure
