
 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskyAdaptability analysis of autonomous vehicles on small-radius circular curves based on co-simulation
- Volume
- CitationZhang Z, Yu X, Zhu L, Wang M. Adaptability analysis of autonomous vehicles on small-radius circular curves based on co-simulation. Smart Constr. 2025(3):0018, https://doi.org/10.55092/sc20250018.
- DOI10.55092/sc20250018
- CopyrightCopyright2025 by the authors. Published by ELSP.
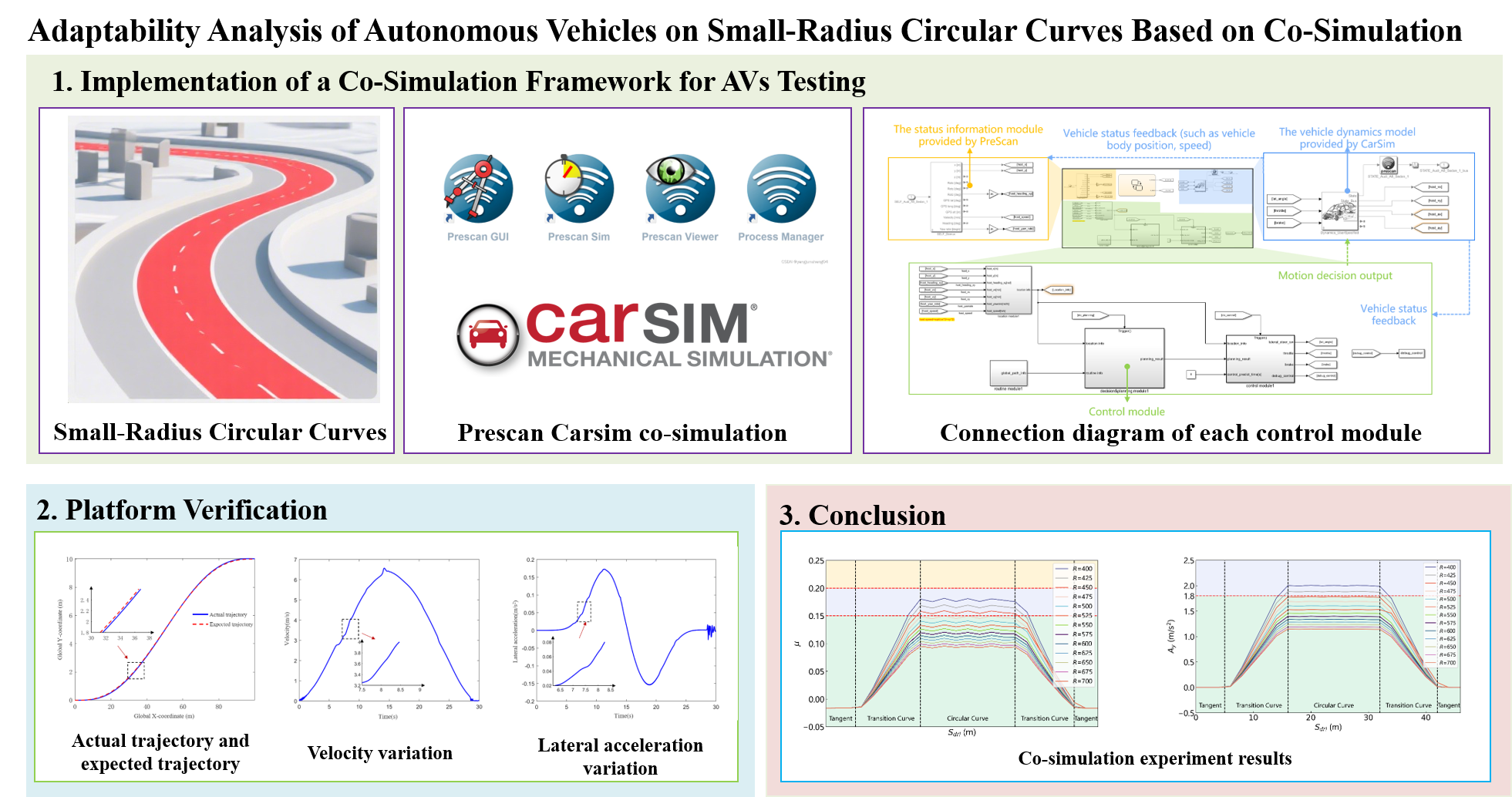
With the rapid development of autonomous driving technology, the incompatibility between traditional road infrastructure and autonomous vehicles (AVs) has become increasingly prominent. This study focuses on small-radius circular curves as a typical challenging alignment feature and systematically analyzes the dynamic response characteristics of AVs under varying speeds and curve radii, ranging from the minimum limit radius to the general minimum radius, A high-fidelity Prescan-Carsim-Simulink co-simulation platform is employed to evaluate the intrinsic relationship between vehicle driving safety, ride comfort, and curve radius. The results indicate that under low-speed conditions (40–60 km/h), when the curve radius approaches the minimum limit, the peak lateral acceleration (0.2–0.4 g) and critical adhesion coefficient (0.15–0.22) substantially reduce the vehicle’s safety margin and degrade occupant comfort to levels 3 (moderately uncomfortable). In contrast, at higher speed (70–100 km/h) combined with larger radii (general minimum), the dynamic response become more stable, improving comfort to levels 1–2 (comfortable to moderately comfortable). This study provides a theoretical basis for the design of road alignment in autonomous driving environments and offers practical recommendations for adapting existing roads and optimizing autonomous driving systems for improved safety and comfort.
autonomous vehicles; small-radius circular curves; adaptability; co-simulation
