 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskyScale-adaptive visual perception and sequence planning for coordinated bimanual robotic disassembly retired power battery
- Volume
- CitationZhang J, Kong S, Wang J, Yan W, Zhou X, et al. Scale-adaptive visual perception and sequence planning for coordinated bimanual robotic disassembly retired power battery. Robot Learn. 2026(1):0002, https://doi.org/10.55092/rl20260002.
- DOI10.55092/rl20260002
- CopyrightCopyright2026 by the authors. Published by ELSP.
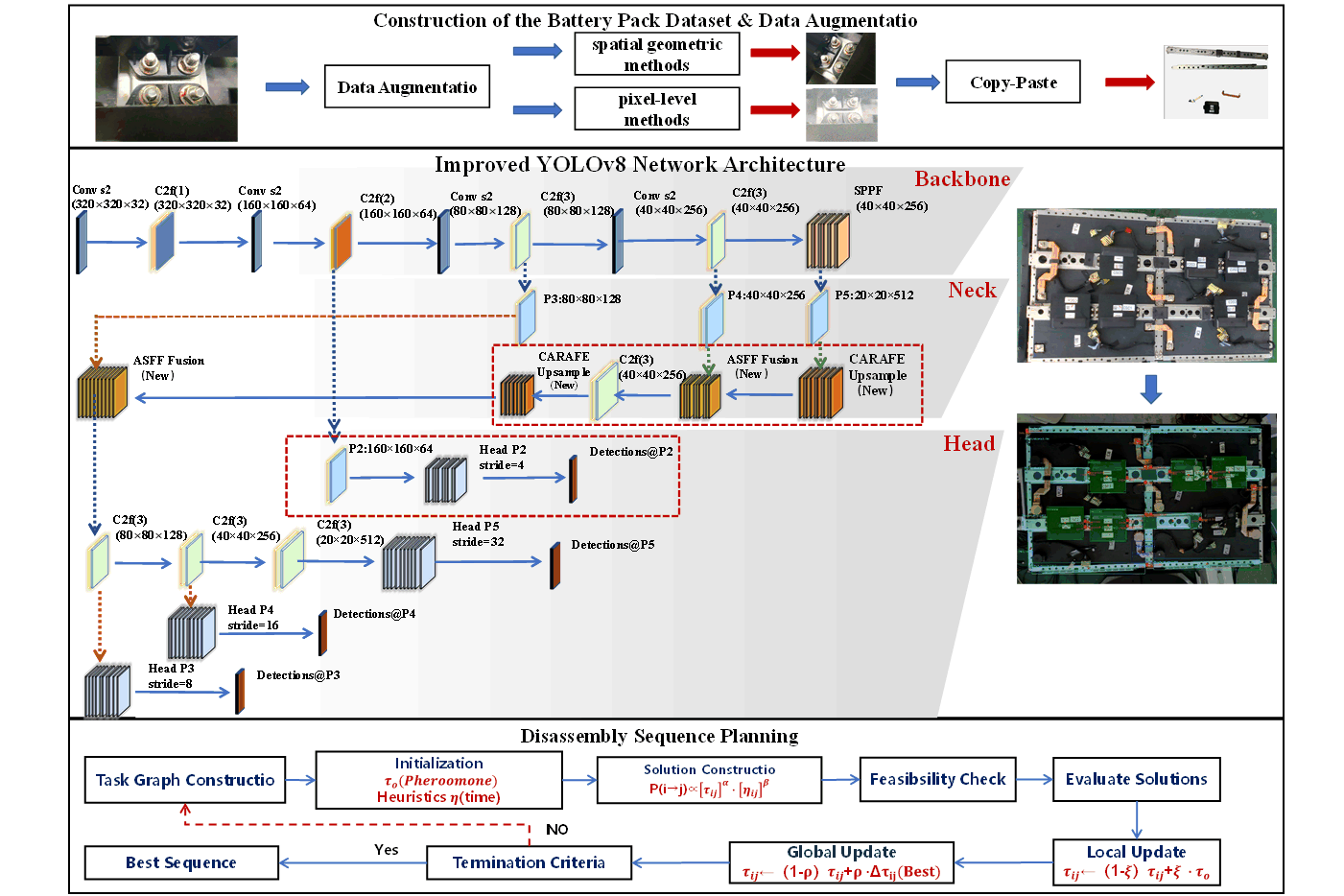
The rapid growth of retired power batteries has created an urgent demand for efficient, safe, and automated disassembly solutions. Existing processes still rely heavily on repetitive manual operations, resulting in low efficiency and potential safety hazards. To address these challenges, this paper presents a novel framework for scale-adaptive visual perception and sequence planning of heterogeneous structural components (e.g., fastener, battery management systems, conductor wires) to enable coordinated bimanual robotic disassembly of retired power batteries. First, a Cell–Module–Pack (CMP) dataset is constructed and augmented to enhance the generalization capability of semantic recognition and pose estimation. Second, an improved YOLOv8-based adaptive visual perception network is developed to robustly recognize and precisely localize irregularly shaped and scale-varying components. On the battery pack dataset, the detection results are: overall Mask Precision 0.961, Mask Recall 0.971, and mAP@50:95 of 0.810; for individual classes, fastener 0.584, copperbar 0.926, structural parts 0.835, and Battery Management System (BMS) 0.957. Third, a sequence planning algorithm based on ant colony optimization is introduced to generate efficient disassembly orders while minimizing task conflicts. The present paper employs dual-arm robotic collaboration for the purpose of disassembly, with a total of 56 planning points and an overall planning length of 5.83 m. The lengths of the left and right arms have been meticulously planned, with the former set at 2.91 m and the latter at 2.92 m. Finally, coordinated bimanual disassembly is realized through precise hand–eye calibration. Experimental validation on real retired battery packs demonstrates that the proposed framework achieves robust visual perception and effective disassembly sequence planning, showing strong potential for industrial application in automated battery recycling.
retired power battery disassembly; bimanual robotic manipulation; scale-adaptive visual perception; disassembly sequence planning
