
 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskyDesign of a household robot with autonomous navigation for object detection and sorting
- Volume
- CitationXu B, Lu Y, Wang J, Bu Q, Leach M, et al. Design of a household robot with autonomous navigation for object detection and sorting. Robot Learn. 2025(1):0005, https://doi.org/10.55092/rl20250005.
- DOI10.55092/rl20250005
- CopyrightCopyright2025 by the authors. Published by ELSP.
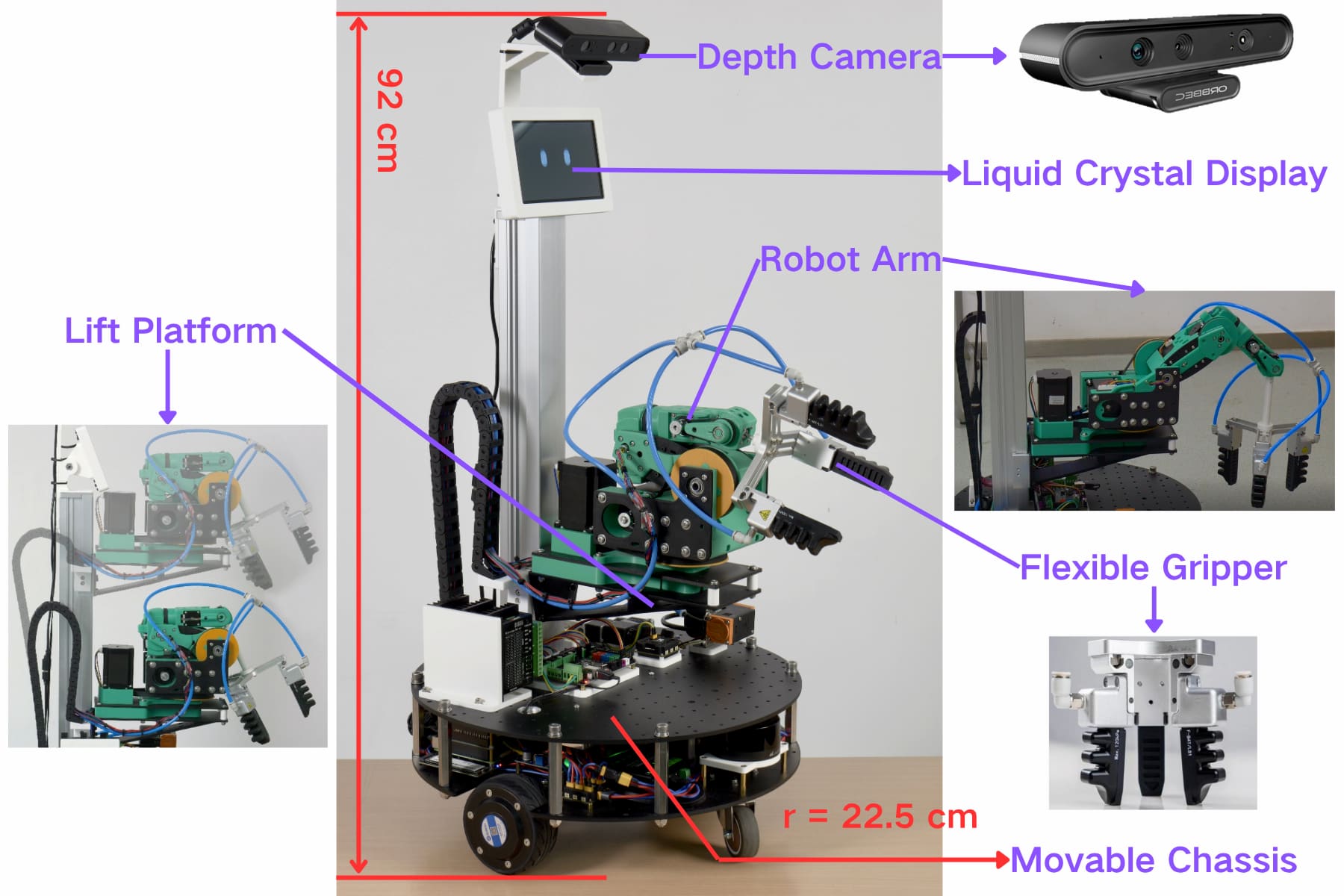
With the continuous advancements in robotics, household robots are increasingly becoming an integral part of daily life. To enhance robots’ functionality and improve accessibility, we propose the development of an intelligent household robot designed to serve as a family assistant. The robot’s automation capabilities enable it to independently perform various tasks, including object retrieval and interactive entertainment. By integrating a movable chassis, robotic arm, lifting platform, and flexible gripper, the robot is capable of grasping objects of varying sizes and types. The robot’s vision system is built in conjunction with the YOLOv11 model, allowing it to detect target objects using a depth camera. Additionally, the robot employs 2D LiDAR and the Navigation2 framework in ROS2 to generate a 2D radar map of its environment. Through this pre-generated map, the robot can autonomously navigate indoor spaces. In addition, a speech recognition system was used to achieve efficient human-robot interaction. A functional prototype has been tested in an indoor setting, demonstrating the effectiveness and feasibility of the proposed design.
object detection; YOLO algorithm; movable household robot; depth camera
