
 X
X Facebook
Facebook LinkedIn
LinkedIn Reddit
Reddit Bluesky
BlueskySocial GAN guided multimodal trajectory prediction and MPC for autonomous driving
- Volume
- CitationJiang Z, Zhu H, Liu R, Hu X, Zhang W. Social GAN guided multimodal trajectory prediction and MPC for autonomous driving. Robot Learn. 2025(2):0010, https://doi.org/10.55092/rl20250010.
- DOI10.55092/rl20250010
- CopyrightCopyright2025 by the authors. Published by ELSP.
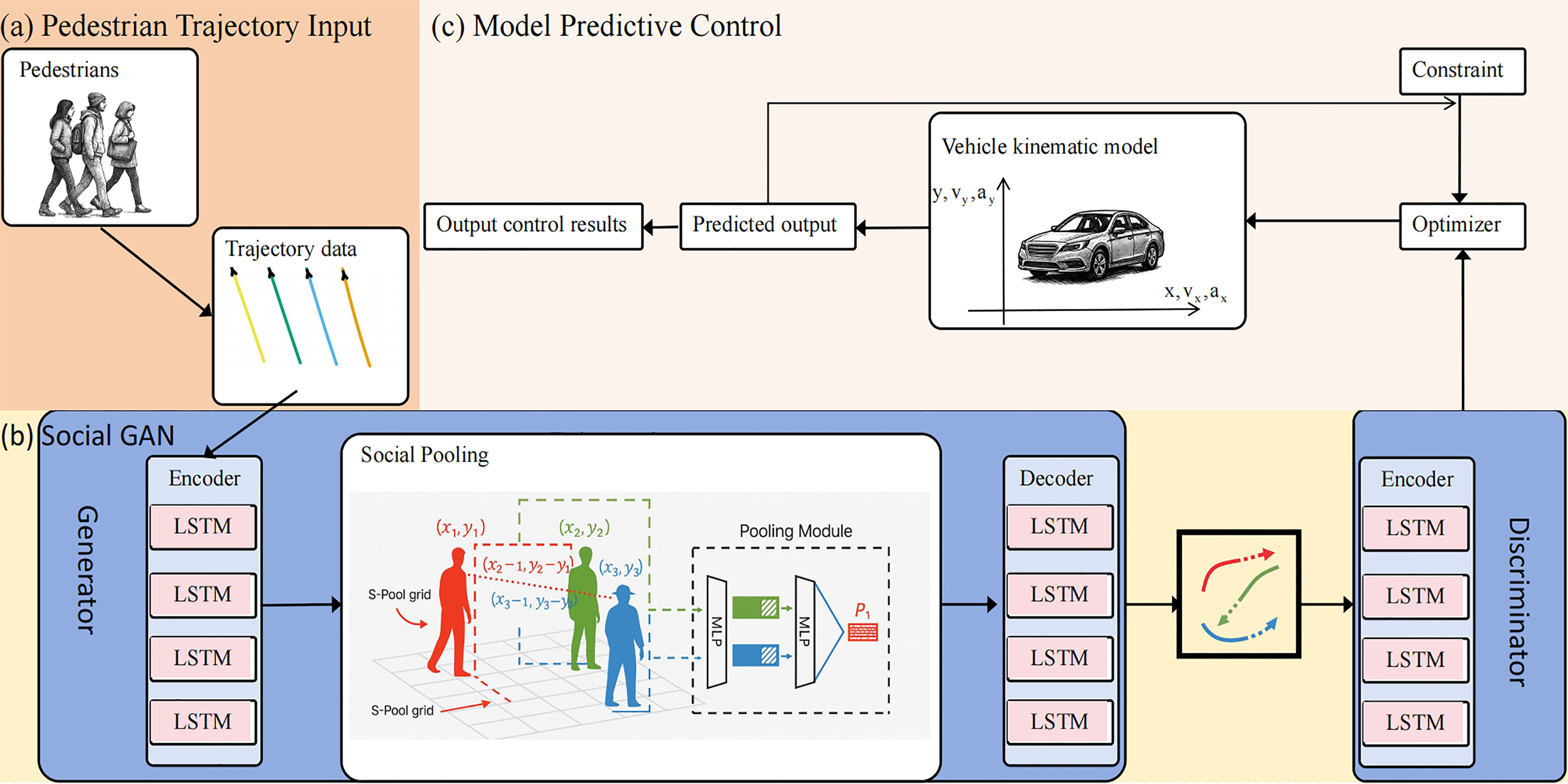
Navigating autonomously in dense, dynamic environments requires autonomous vehicles to reason about multiple, socially plausible futures of surrounding pedestrians while ensuring safe and feasible motion. To bridge the gap between multimodal trajectory prediction and safety-critical control, this paper introduces a novel end-to-end prediction-to-control pipeline that seamlessly integrates socially consistent, multimodal trajectory proposals from a Social Generative Adversarial Network (Social GAN) directly into a constraint-aware Model Predictive Control (MPC) planner. Unlike approaches that compress predictions into a single mode or use them only as soft costs, our method explicitly incorporates the diverse trajectory hypotheses generated by Social GAN as time-varying dynamic obstacles within the MPC’s optimization problem. This preserves the intent diversity crucial for negotiation in crowded spaces and allows the controller to plan for a spectrum of possible outcomes proactively. Evaluated on the ETH/UCY datasets and in dynamic crowd simulations, the integrated Social GAN+MPC controller achieves zero safety violations and maintains a larger average pedestrian clearance (0.94 m) compared to a reactive baseline, at the cost of only a marginal increase in travel time and a modest reduction in path efficiency due to risk-averse maneuvering. The increase in mean acceleration (0.57 m/s2) and jerk (1.34 m/s3) remains within acceptable comfort bounds, demonstrating that the framework delivers proactive safety without compromising real-time feasibility. This work demonstrates that coupling calibrated, intent-diverse predictions with a robust optimizer provides a practical and effective pathway toward zero-collision autonomous driving.
pedestrian trajectory prediction; safety-aware motion planning; Social GAN; model predictive control
