Mechatronics Technology
ISSN: 2959-376X (Print)
ISSN: 2959-3778 (Online)
CODEN: MTEEEV
No items found.
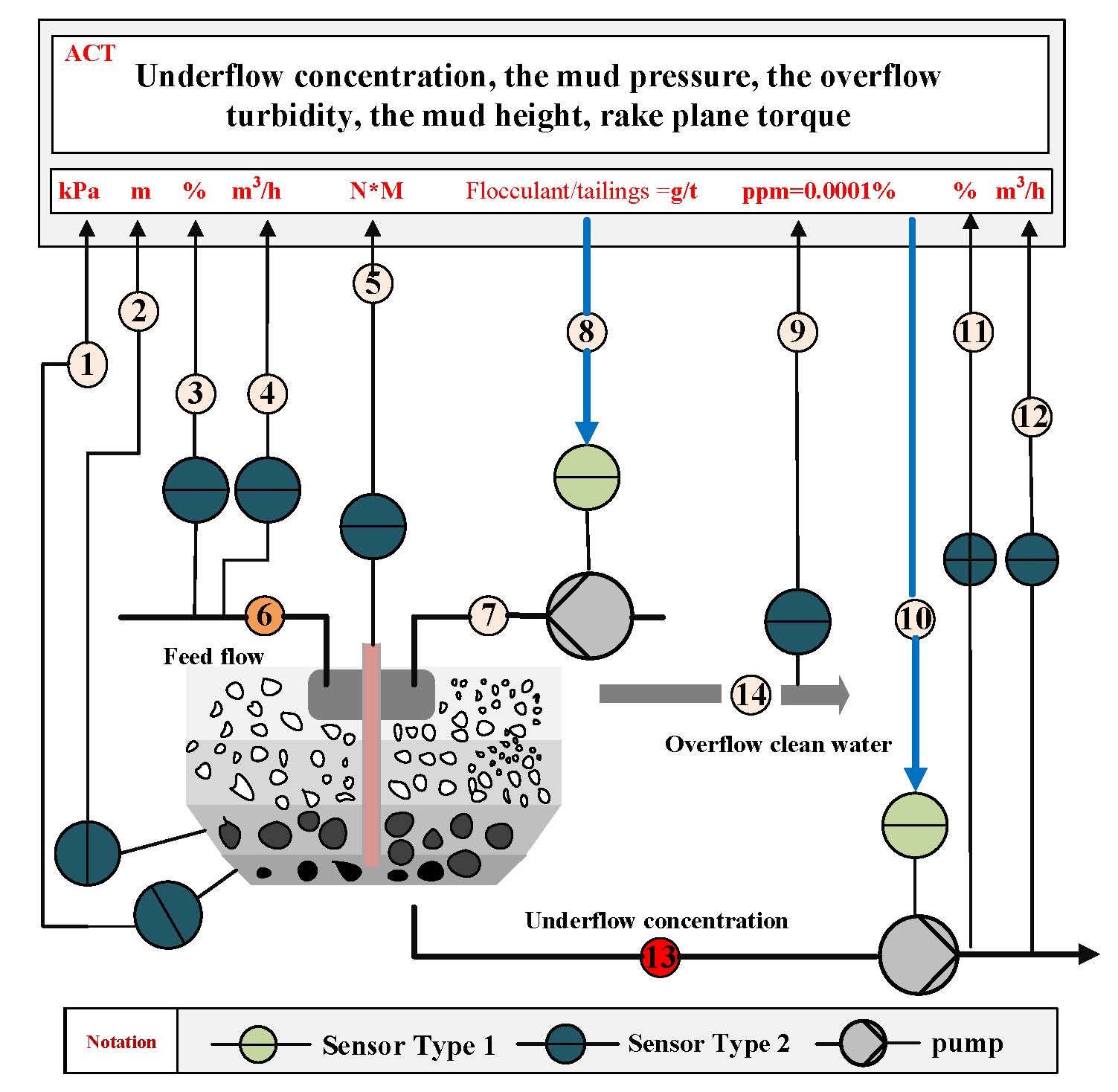
Underflow concentration soft sensing for cone thickener system based on a direct data-driven quantile regression forecasting
DOI: 10.55092/mt20250001
Paste-filling is a crucial process in the mining industry. Traditional sensor devices often overlook model errors and struggle to measure the certainty of key quality variables. This study addresses these challenges by proposing a novel efficient data-driven forecasting framework to predict the concentration of deep cone thickeners (DDQRF). Conventional methods rely on normal regression models, minimizing residual mean square error to estimate underflow concentration, resulting in inaccuracies due to residual error accumulation in recursive strategies. Specifically, complex high-quality feature representation is essential for accurate prediction models, particularly for multiple horizon predictions necessary for hierarchical optimal control. Our framework introduces direct data-driven regression prediction, leveraging temporal machine learning models to extract features effectively. Unlike probabilistic Bayesian models, our approach offers efficient implementation and deployment, utilizing prediction intervals to quantify forecast uncertainty. In addition, the proposed model directly predicts multiple horizons, contrasting with traditional recursive single-point forecasting, offering enhanced training and memory efficiency. These characteristics are validated through industrial experiments on a deep cone thickener, comprehensively comparing performance with state-of-the-art counterparts.
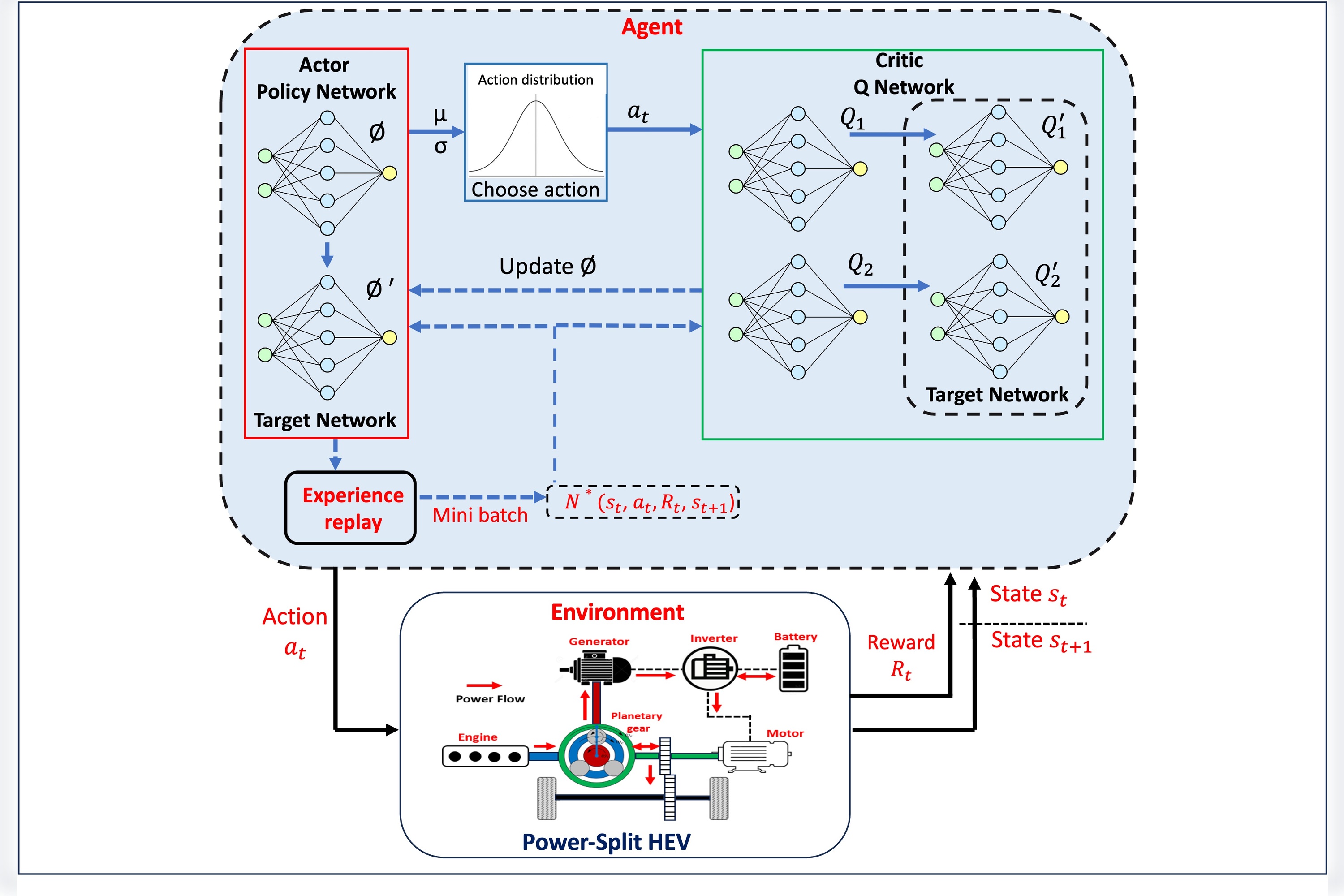
Adaptive learning-based energy management for HEVs using soft actor-critic DRL algorithm
DOI: 10.55092/mt20240005
In this work, we design an energy management strategy (EMS) for hybrid electric vehicles (HEVs) using a deep reinforcement learning (DRL) algorithm. Specifically, this paper introduces a soft actor-critic (SAC)-based EMS, tailored for devising optimal energy distribution for HEVs. The proposed SAC-based approach is useful for addressing inherent drawbacks that exist in many DRL methods such as slower convergence rate, discretization error, as well as suboptimal solutions. The designed SAC algorithm presents a self-adaptive efficiency in executing continuous decision-making policies through the balance of exploration and exploitation using an entropy-based action selection method and an entropy-added reward function. Extensive experiments are carried out to demonstrate the merits of the adaptive SAC algorithm over the widely adopted Q-learning (QL), deep-Q-network (DQN), and deep deterministic policy gradient (DDPG) approaches on fuel economy and battery charge sustainability. An unknown driving cycle is also employed to show the adaptability feature of the proposed scheme, revealing fuel savings of 6.26%, 3.01%, and 2.03% over the QL-based, DQN-based, and DDPG-based methods, respectively.
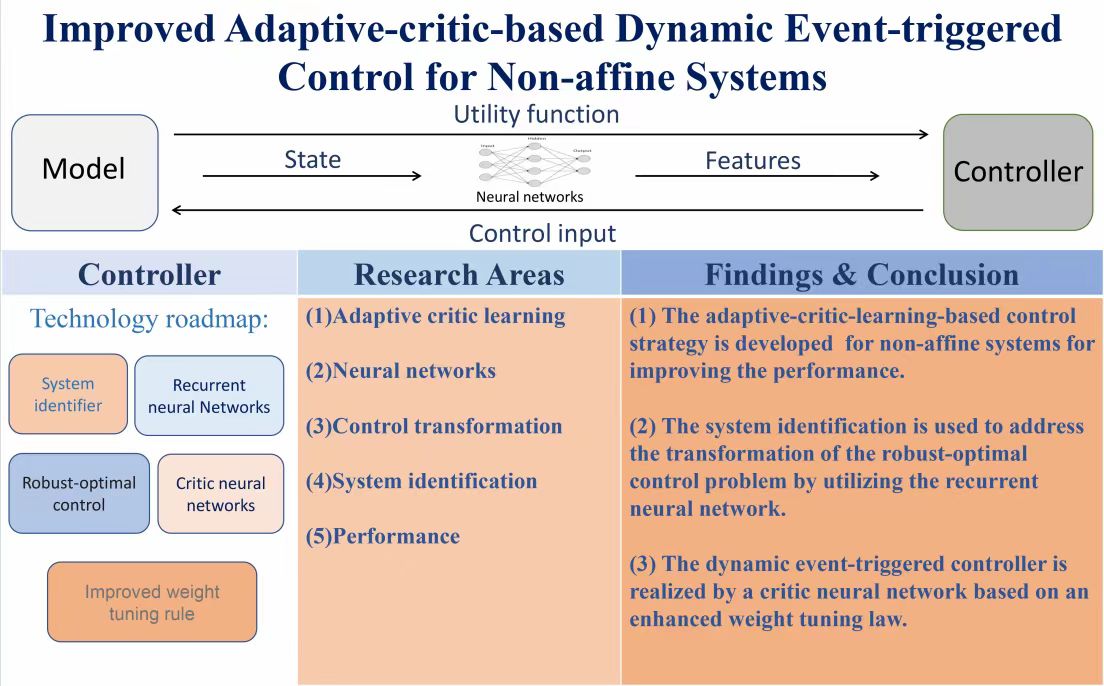
Improved adaptive-critic-based dynamic event-triggered control for non-affine systems
DOI: 10.55092/mt20230002
In this paper, by employing a recurrent neural network and a critic neural network (CNN), we design an improved dynamic event-triggered controller for a class of non-affine continuous-time nonlinear systems. To address the transformation of the robust-optimal control problem, an additional utility function reflecting the disturbance is introduced. Besides, a system identifier is utilized for reconstructing the non-affine dynamics to generate an affine model. For reducing the waste of communication resources, a dynamic event-triggered control strategy is developed to replace the traditional time-based structure and improve static event-triggered control design. In addition, we develop an enhanced CNN weight updating law, which allows for greater flexibility in the process of weight selection compared to the conventional approach. The dynamic event-triggered controller is designed by using the CNN framework. Finally, a simulation of a modified torsional pendulum system is performed to demonstrate the effectiveness of the constructed method.
No items found.
No items found.
No items found.