Robot Learning
ISSN: 2960-1436 (Print)
ISSN: 2960-1444 (Online)
CODEN: RLABAV
No items found.
Survey on heterogeneous aquatic robot systems: communication, perception, navigation, control, decision-making and energy management
DOI: 10.55092/rl20250003
Heterogeneous aquatic robot systems, consisting of ROVs, AUVs, ASVs, and UAVs, are vital for environmental exploration, monitoring, and task execution. This paper presents advancements in critical technologies within these systems, focusing on communication (underwater acoustic, radio, and optical), multi-sensor fusion, and collaborative navigation techniques. It reviews control strategies like deep reinforcement learning, end-to-end control, and large model-based methods, addressing autonomous decision-making and adaptability in complex environments. The paper also discusses energy management strategies for efficient storage, utilization, and recovery. Furthermore, it explores the ethical and environmental impacts of deploying such systems, emphasizing sustainability and minimizing ecological disruptions. Finally, case studies and applications in ocean exploration and environmental monitoring are highlighted, showcasing the real-world utility and future potential of heterogeneous aquatic robot systems. This work provides valuable insights into the technological, ethical, and practical considerations for developing these systems.

Quadrotor UAV-based smoke detector system using YOLOv8 towards wildfire prevention
DOI: 10.55092/rl20250001
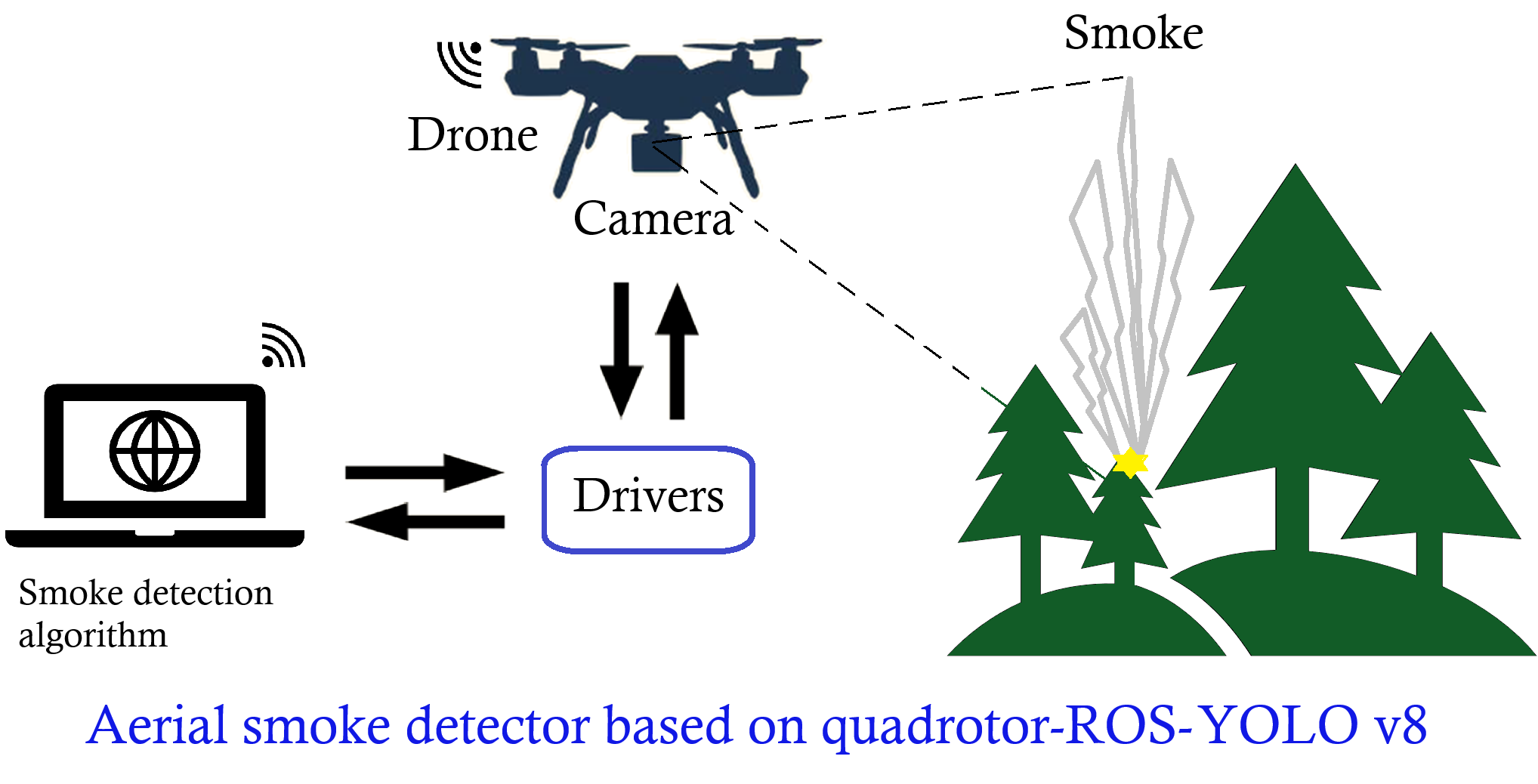
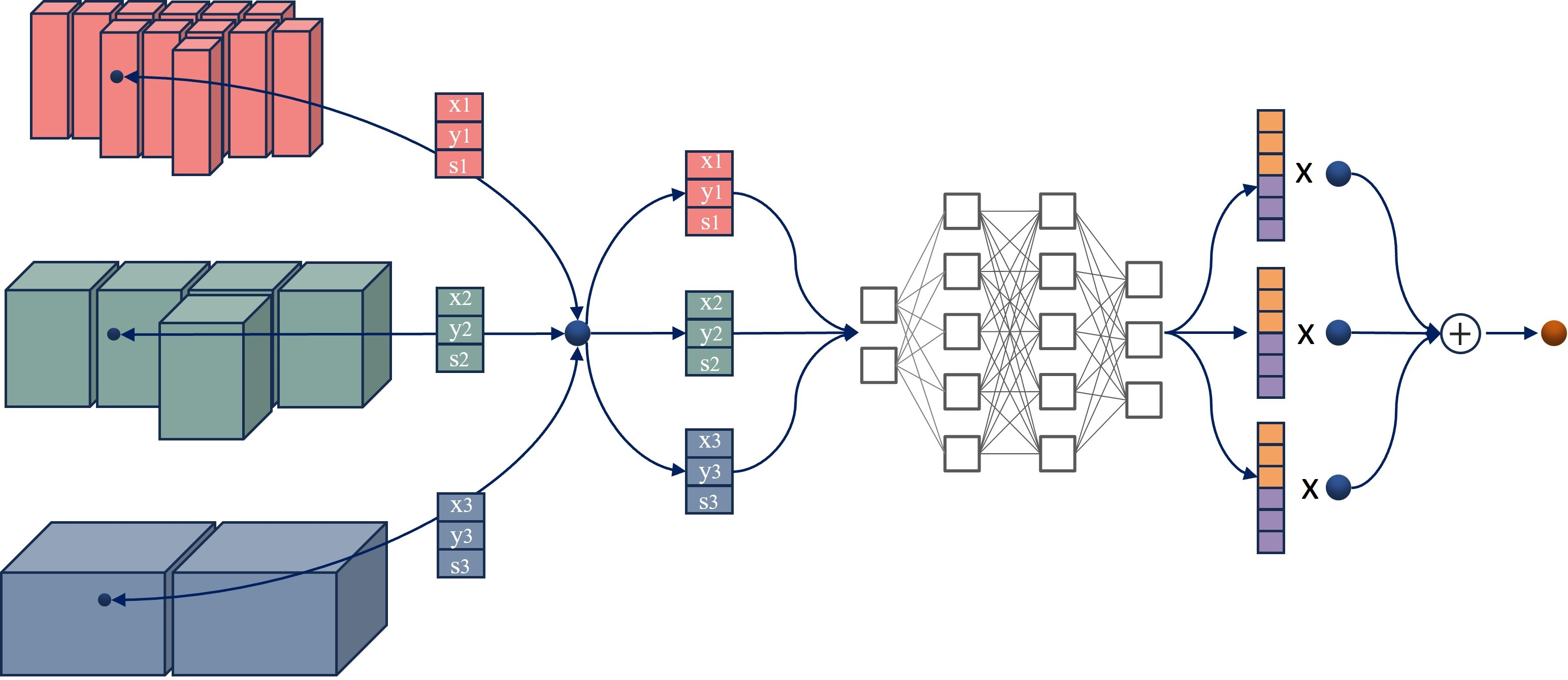
Wildfires represent an escalating global threat to both the environment and society due to their frequency, duration, and expansion, which is exacerbated by climate change. Furthermore, recent heat waves underscore the critical need for swift detection and response mechanisms to curb wildfires from escalating into fully developed and uncontrollable stages. In that sense, this manuscript addresses an aerial smoke detector, composed of an unmanned aerial vehicle equipped with a camera, where visual information is sent to a ground station based on robotic operating system, where the proposed smoke detection methodology is deployed in real time. Such approach is formulated on an optimized YOLOv8 nano model, which is specifically trained using a customized data base with smoke under defying conditions. This solution ensures peak performance even within limited computational resources. The experimentally tests conducted first using images and videos, then, taking the video from the drone under controlled laboratory conditions, and finally by unstructured field experiments, such scenarios determine its robustness under such challenged conditions, producing confidence over 70%, and reducing the bias by validation metrics such as 95% of precision, and 88.5% of recall, respectively.
Optimizing scene flow with neural rigidity prior
DOI: 10.55092/rl20240004
Scene flow estimation provides the 3D low-level motion understanding in dynamic scenes. In this paper, we propose an optimization-based scene flow estimation method with neural rigidity prior for the autonomous driving environment. Specifically, we utilize the rigidity prior of dynamic scenes to partition the point clouds into pillars of different resolutions. Then, the flow vector of a point is represented as the average of local rigid transformations associated with the different pillars to which it belongs. To model local rigidity, we employ the neural implicit representation for encoding the intrinsic constraints of pillars. Our method achieves state-of-the-art accuracy on three commonly-used autonomous driving datasets: Argoverse, Waymo, and nuScenes, and even surpasses previous supervised learning-based methods. Experiment results demonstrate the effectiveness of our method, particularly on sparse points in the autonomous driving scene.
No items found.
No items found.
No items found.