Artificial Intelligence and Autonomous Systems
ISSN: 2959-0744 (Print)
ISSN: 2959-0752 (Online)
CODEN: AIASBB
Multimodal trajectory prediction based on dynamic scene encoding and relational reasoning
Autonomous vehicles require effective prediction of potential future trajectories of surrounding agents. The current trajectory prediction methods have limitations, firstly, traditional feature fusion methods merge scene features sequentially in a simplistic manner, often overlooking the intricate interrelations among scene elements, leading to incomplete selection and insufficient utilization of useful features; secondly, in multimodal trajectory prediction, the mode collapse issue inherent to probabilistic approaches results in inadequate expression of agent intent uncertainty, while overly anchor-dependent proposal-based methods can generate implausible trajectories. To address these limitations, We present a Dynamic scene and Relational reasoning Transformer (DRTR), a novel multimodal trajectory prediction method based on dynamic scene encoding and relational reasoning. A pivotal aspect of DRTR is the dynamic closed-loop modeling framework that effectively combines scene features to output three dynamic features: dynamic traffic flow, dynamic agents, and interactions between agents. This innovative framework ensures a comprehensive capture of the dynamic scene and its intricate interrelations. Then, DRTR initializes a set of trajectory suggestions representing various modalities and carefully refines these suggestions by sequentially fusing and querying dynamic scene features, ensuring predictions are both accurate and reflect multimodality. To further enhance model expressiveness, we introduce a feature selection network based on relational reasoning, which can recognize deep relationships between scene elements and select beneficial contextual features. Experiments on the Argoverse 1 dataset indicate that DRTR exhibits superior performance, particularly in multimodal trajectory prediction.

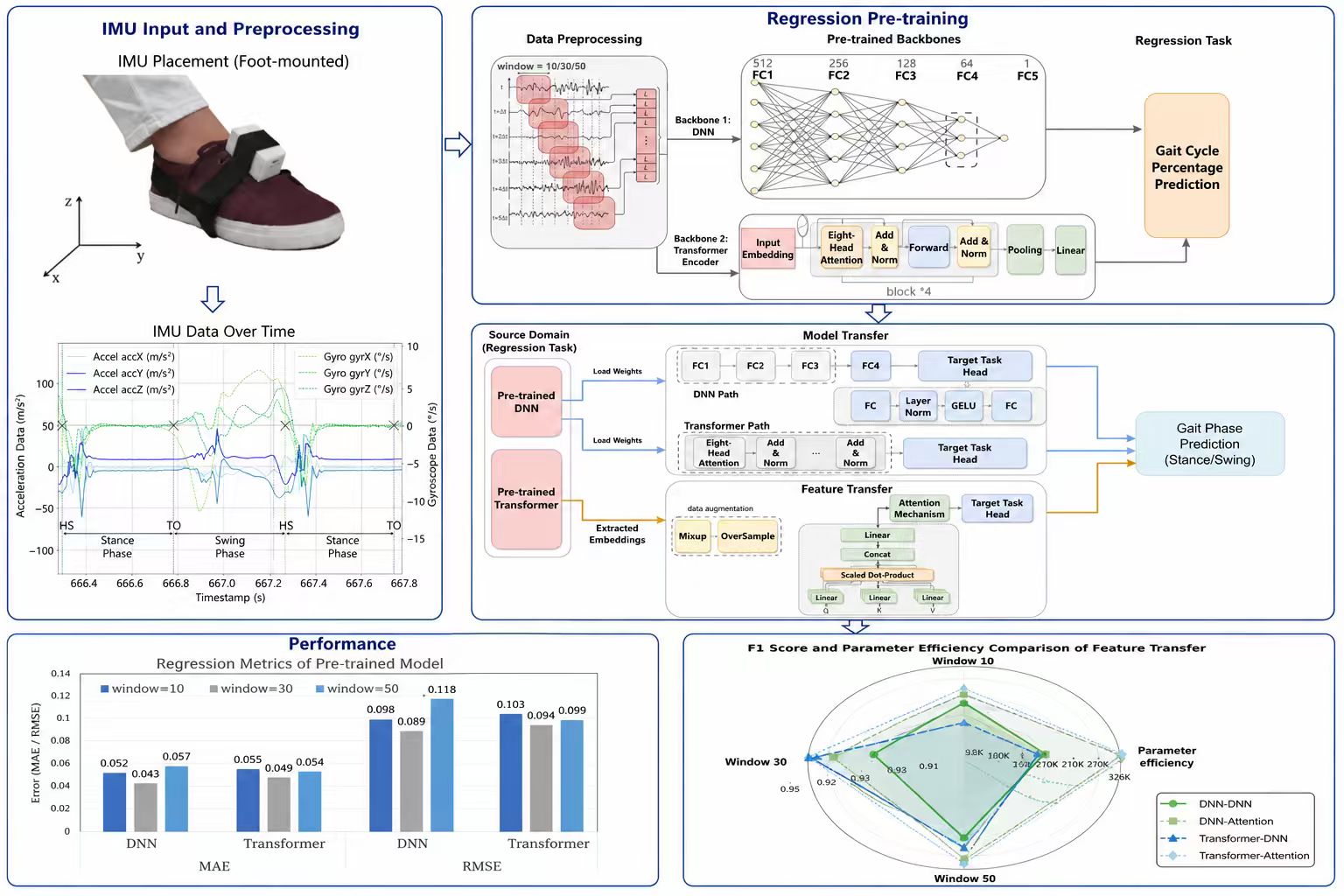
Transfer learning from gait cycle percentage prediction to gait phase classification using wearable sensors
Reliable gait phase classification is essential for wearable-based locomotion analysis. Although gait cycle percentage prediction and gait phase classification are biomechanically related, knowledge transfer across these distinct objectives remains underexplored. In this paper, we propose a regression-to-classification transfer learning framework that utilizes temporal representations learned from continuous gait cycle progression to improve discrete phase recognition. We pre-train neural backbones on a regression task and transfer the learned representations to the classification task through model transfer (fine-tuning backbone weights) and feature transfer (using the backbone as a fixed feature extractor). To identify the optimal configuration for resource-constrained environments, we compare a compact Deep Neural Network (DNN) with 0.3 M parameters and a Transformer model across multiple sliding window sizes. Our experimental results demonstrate that model transfer achieves a superior F1-score of 0.9788, outperforming the feature transfer baseline and models trained from scratch. Efficiency tests show that the compact DNN achieves a Central Processing Unit (CPU) latency below 0.07 ms, supporting real-time data processing. Validation on an independent dataset further confirms cross-population robustness, achieving a classification accuracy of 92.3%. These findings suggest that regression pre-training captures effective temporal features, providing a practical framework for wearable-based gait analysis.
An intelligent and highly reliable system for safe autonomous railway driving
Railway transportation is increasingly relying on autonomous technology to improve safety and efficiency. However, conventional control systems often lack the ability to adapt to the dynamic and uncertain nature of railway environments. In this paper, we propose an intelligent autonomous train framework that integrates computer vision, artificial intelligence–based risk assessment, and adaptive decision-making. The proposed system is organized into four complementary phases, namely multi-sensor environmental perception, object detection using You Only Look Once version 5 (YOLOv5), deep neural networks aligned with safety integrity levels (SIL), and open automata–based control for real-time decision generation. All of these components work together to ensure that trains can operate independently and safely in complex situations. Experimental results demonstrate the system’s ability to accurately assess risks and provide robust and reliable performance under realistic operational conditions.

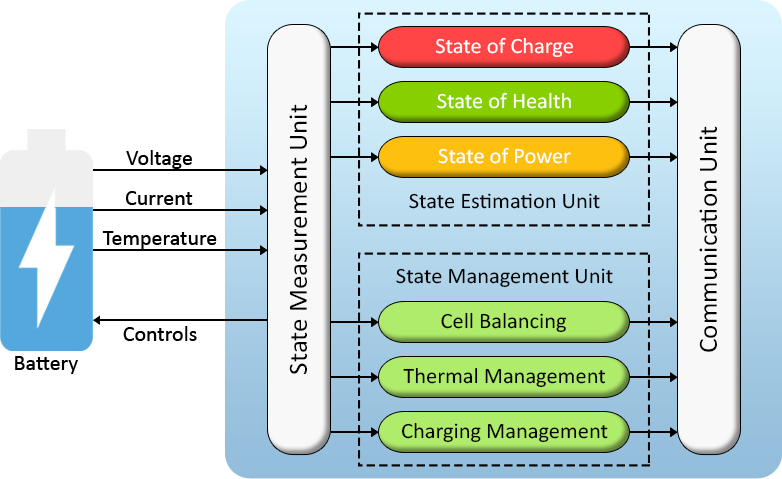
Machine learning driven digital twin model of Li-ion batteries in electric vehicles: a review
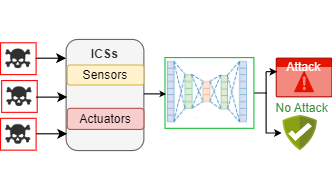
Cyberattack detection on SWaT plant industrial control systems using machine learning
Detecting cyberattacks is critical for maintaining the security and integrity of industrial control systems (ICSs). This study introduces a machine learning approach for identifying cyberattacks on the Secure Water Treatment (SWaT) plant testbed. The dataset, sourced from the Singapore University of Technology and Design, includes data from 51 sensors and actuators. The research employs a Long Short-Term Memory (LSTM) network alongside traditional machine learning algorithms like Random Forest (R.F.), Support Vector Machine (SVM), and K-Nearest Neighbour (KNN) to classify cyberattacks. The LSTM model outperformed the other methods, achieving a test accuracy of 98.02% (cyberattack: 97.80%, non-attack: 98.30%). Given the imbalanced nature of the dataset, additional metrics such as precision, recall, and F1 score were evaluated, further confirming the LSTM model’s robustness compared to traditional algorithms. This research demonstrates the LSTM network’s effectiveness in enhancing cybersecurity for ICSs and underscores the need for proactive strategies in detecting and mitigating cyber threats.